Coordinate Frames in Robotics
THAT after all is the goal here. Lynch and Frank C.
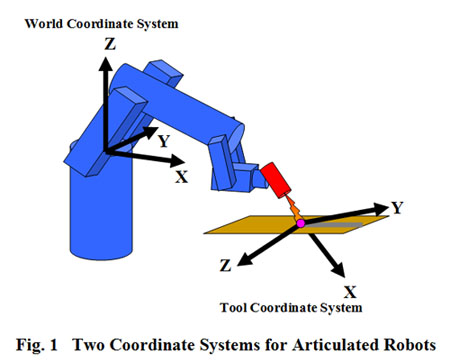
2 Industrial Robot Functionality And Coordinate Systems Inlearc
The coordinate frame called odom is a world-fixed frame.

. Each rigid body has a rigidBodyJoint object associated with it that defines how it can move relative to its parent body. This is called the homogeneous coordinate representation of the 3-vector. Old behaviour is to return a list of n frames 1 to n but if oldFalse it returns n1 frames 0 to n ie.
The files are named X_type_Y. The platforms and software stacks developed by research groups 2 4 1621 vary strongly in their choice of hardware and software toolsThis is expected because optimizing a robot with respect to different tasks based on individual experience in a closed-source research environment leads to a fragmentation of the research community. 47 815 ratings 5 stars.
The broad fields of control and robotics are the major areas covered together with connections to theoretical and applied mechanics optimization communication information theory machine learning computing and signal processing. It is a handheld device with a color touchscreen a custom keypad and various safety devices such as a deadman switch emergency stop and enable switch that can be swapped out with a key switch for security. With all of this code out of the way and done for you that leaves you with the task of doing something useful with the information the user entered.
The teach pendant is the main user interface for the FANUC robots. You will build on a library of robotics software in the language of your choice among Python Mathematica and MATLAB and use the free cross-platform robot simulator V-REP which allows you to work with state-of-the-art robots in the comfort of your own home and with zero financial investment. 1 while driving in and around Karlsruhe Germany Fig.
Many rely on elaborate state machines that coordinate the execution of motion primitives and reflex. Odom frame has its origin at the point where the robot is initializedThis coordinate frame is fixed in the world. Map frame has its origin at some arbitrarily chosen point in the world.
However choosing different conventions should be well justified and well documented. Keyframe-Based Visual-Inertial SLAM using Nonlinear Optimization. Interstellar lengths are not appropriately measured in.
Robotics Stäubli Robotics is a leading international player in industrial automation providing engineering and technical support recognized for their efficiency and reliability. There are three different frames available tool frames user frames and jog frames. Each objectmodel can be individually controlled via an embedded script a plugin ROS ROS2 nodes remote API clients or a custom.
The z axis of the frame H i z is parallel to e g and H i x is the projection of the. And the total number of ROS repositories passing 100 on 5 May. Use setFixedTransform to define the fixed transformation between the frame of a joint and the frame of one of the adjacent bodies.
Type denotes the type of data. Each frame is stored in a numbered table and can be grouped by function similar to. CoppeliaSim User Manual Version 43.
We could naively try our subscript cancellation rule again but this doesnt work. In addition to developing the sensors themselves we are interested in algorithms for estimation control and manipulation that make use of the novel sensors. H i is a reference frame that is attached below the hip joint of the ith leg.
The journal covers important intersections with fields outside of engineering including biology neuroscience and human behavioral sciences. field robotics computer vision cameras laser GPS benchmarks stereo optical flow SLAM object detection tracking KITTI I. Camera and velodyne data are available via properties that create generators when accessed or through getter methods that provide.
The robots base or tool transform if present are incorporated into the result. T_sb and p_b have a dimension mismatch. X denotes the number of frame.
This coordinate frame is fixed in the world. This course provides an introduction to engineering practice through hands-on investigations computer applications and design projects in the fields of structures and robotics. As it was continuously recorded the frames are numered in ascending order.
Import pykitti basedir yourdatasetdir date 2011_09_26 drive 0019 The frames argument is optional - default. The scope of potential robotics software is too broad to require all ROS software to follow the guidelines of this REP. This is bleeding edge.
This drift makes the odom frame useless as a long-term global reference. In Proceedings of Robotics. For example there are domains where the default conventions are not appropriate.
All of the boilerplate code the event handling widget creation frames containing widgets etc are exactly the same objects and calls that you would be writing if you wrote directly in tkinter Qt etc. You can add replace or remove rigid bodies from the. KITTI GT Annotation Details.
Park May 3 2017 This document is the preprint version of Modern Robotics Mechanics Planning and Control c Kevin M. Proximity information is provided in the local coordinate frame of the fingers eliminating errors that arise when sensors and actuators are in different frames. Are defined in the horizontal frames of the feet H i i 12 34.
2011 was a banner year for ROS with the launch of ROS Answers a QA forum for ROS users on 15 February. The user manual is included in the downloadable CoppeliaSim packages. Lynch and Frank C.
The OSRF was immediately awarded a. Each coordinate represents a point where square corners are detected on the checkerboard. The number of points the function returns depends on the value of boardSize which indicates the number of squares detected.
The ground truth annotations of the KITTI dataset has been provided in the camera coordinate frame left RGB camera but to visualize the results on the image plane or to train a LiDAR only 3D object detection model it is necessary to understand the different coordinate transformations that come into play when going from one sensor to. As we captured data from 4. The introduction of the highly successful TurtleBot robot kit on 18 April.
Our primary robotics research platform is our labs dedicated. INTRODUCTION The KITTI dataset has been recorded from a moving plat-form Fig. From Industrial Robotics Automation - Fanuc Teach Pendant Programming.
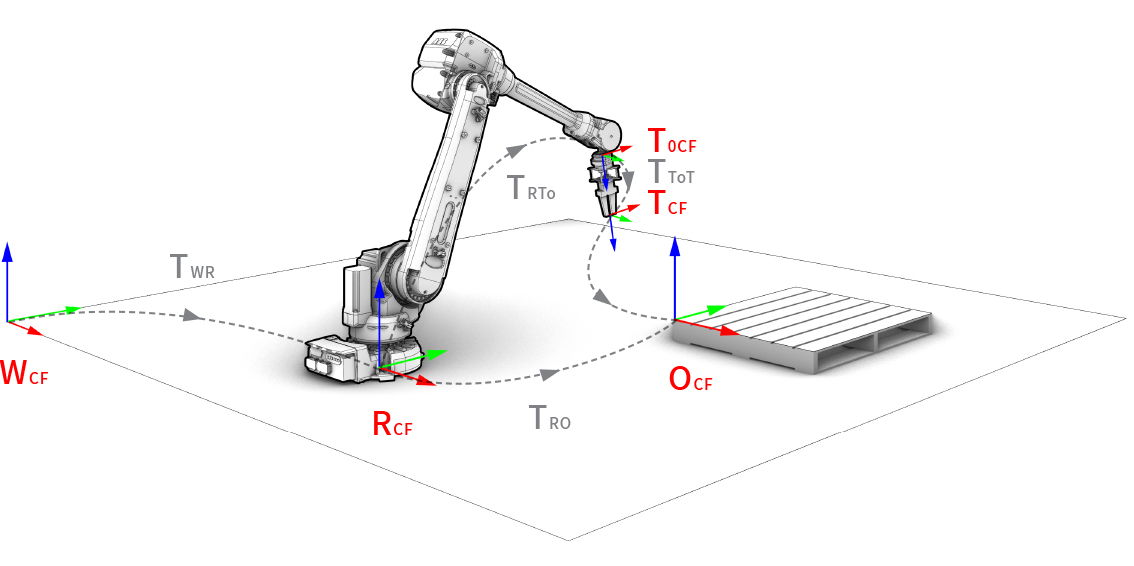
Let p_b and p_s be the representations of the point in the b and s frames. A frame is a defined coordinate system used as a matter of convenience when the straight lines of an external conveyor welding jig or perhaps a machine chuck dont line up with the robot base. Stereo pair images from.
Images2 Stereo pair images from camera 2 height-by-width-by-color channel-by-number of frames array. 3 Stefan Leutenegger Paul Timothy Furgale Vincent Rabaud Margarita Chli Kurt Konolige Roland Siegwart. A color image of a hand.
A rigid body tree model is made up of rigid bodies as rigidBody objects. The official ROS documents have an explanation of these coordinate frames but lets briefly define the main ones. It includes the base frame.
3D joints positions in the real world coordinate frame Finally Y denotes the source camera. The pose of a mobile platform in the odom frame can drift over time without any bounds. However the pose of a robot in the odom frame is guaranteed to be continuous meaning that the pose of a mobile platform in the odom.
None which loads the whole dataset. It includes camera images laser scans high-precision GPS measurements and IMU accelerations from a. All investigations and design projects are performed in groups and presented in oral andor written form.
Note that the codebase that you are provided here is free of charge and without any warranty. Joint offsets if defined are. From SCARA 6 axis robots and cobots to mobile robot systems and AGV our powerful high-precision solutions allow us to work with clients in many industries to help them tackle the challenges of Industry.
Calibration timestamps and IMU data are read automatically. Computers are used for documentation data analysis and robot control. The distance equals the nominal reach of the leg.
To fix this we simply append a 1 to the end of each vector making the 3-vector into a 4-vector. MODERN ROBOTICS MECHANICS PLANNING AND CONTROL Kevin M. Willow Garage began 2012 by creating the Open Source Robotics Foundation OSRF in April.
The robotics simulator CoppeliaSim with integrated development environment is based on a distributed control architecture. Base_footprint has its origin. Park This preprint is being made available for personal use only and not for further distribution.
Science and Systems 2013. The book will be published by Cambridge University Press.
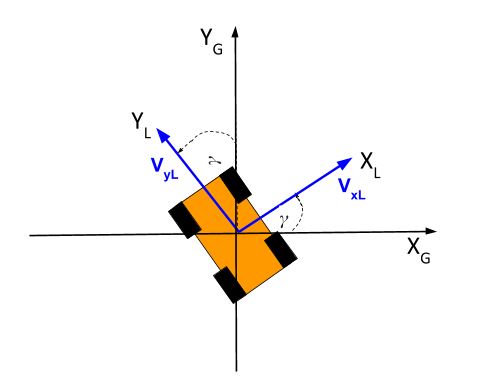
How To Describe The Rotation Of A Robot In 3d Automatic Addison
Robot Basics The Importance Of The Tool Center Point Plasma Powders
Fundamentals Of Robot Motions Configurations Introduction
Representing Robot Pose The Good The Bad And The Ugly Paul Furgale
Compas Fab 1 2 Coordinate Frames

Coordinate Frame Arrangement Of The Robotic Arm External And Local Download Scientific Diagram
0 Response to "Coordinate Frames in Robotics"
Post a Comment